Projects (click the images to learn more!)
Zero-G Tumbling Target Capture
Motion planning and trajectory control for capture of tumbling objects in zero-G using the Drake toolbox.
Final project for Manipulation at MIT.
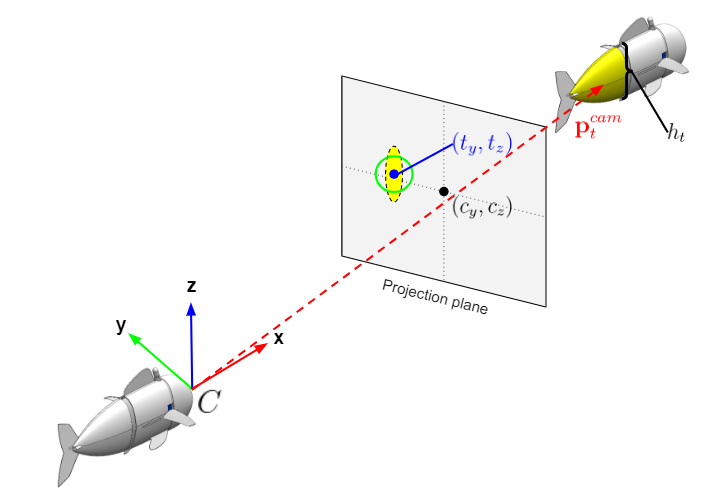
Leader-follower Coordination of Soft Robotic Fish
A vision-based coordination strategy for autonomous, untethered soft robotic fish that I worked on for my graduate research project.
Presented and published at the 2022 IEEE OES AUV Symposium.
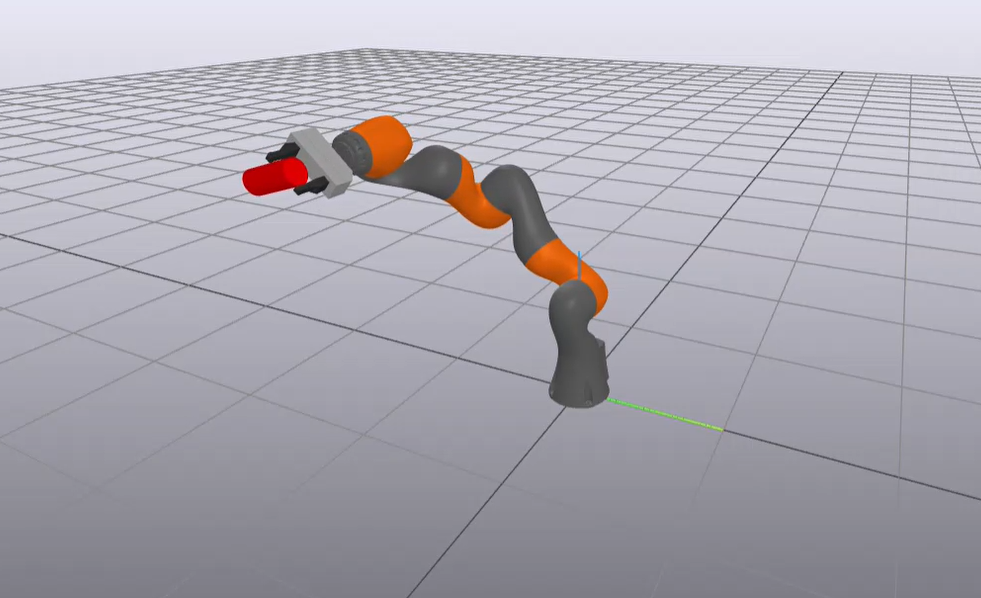
Vision-based Autonomy for a Quadruped Robot
Developing a ROS2 software stack to perform control, localization, and mapping on the open-source Stanford pupper quadruped robot.
The goals of this project are to re-enforce my robot autonomy fundamentals and to further hone my C++ skills.
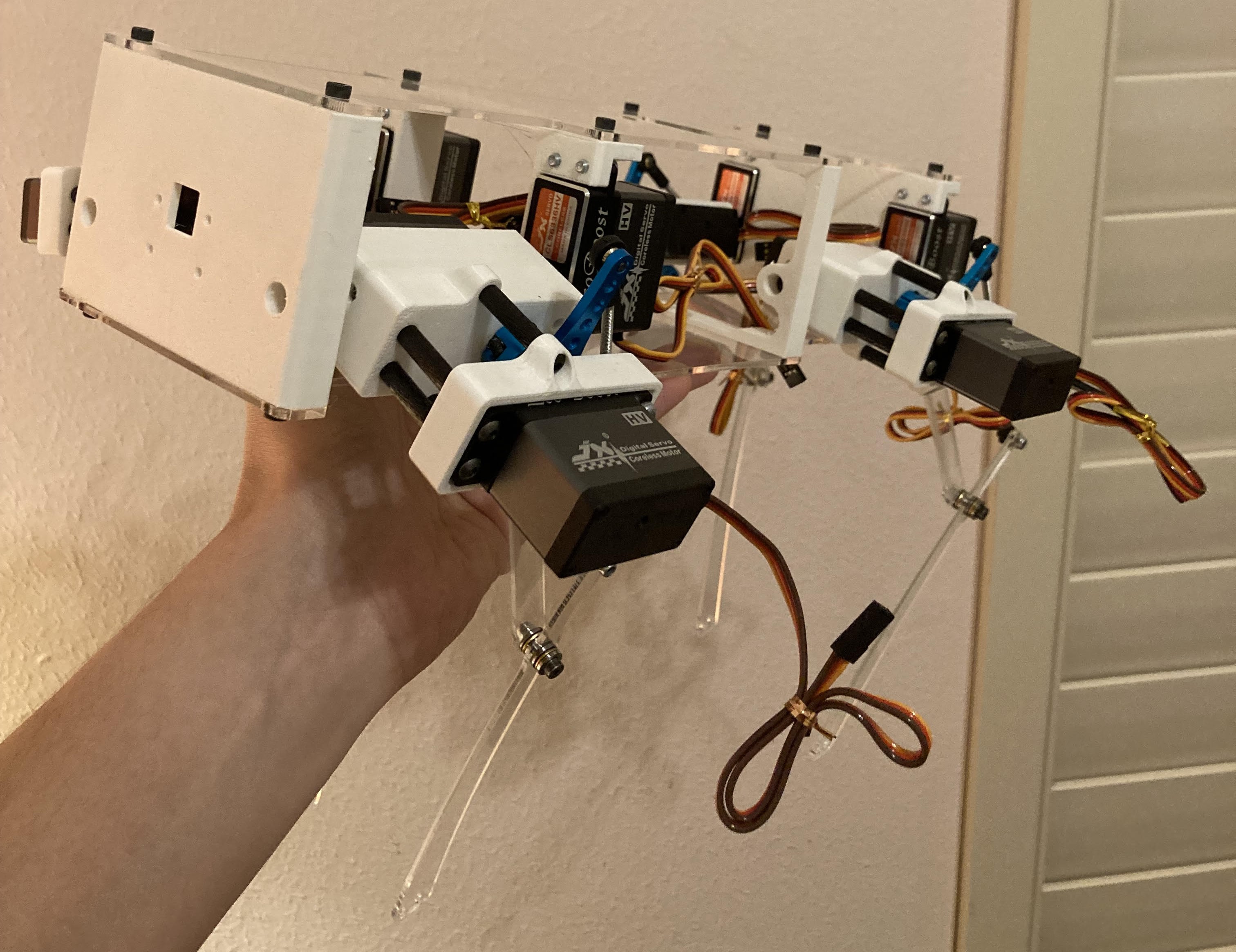
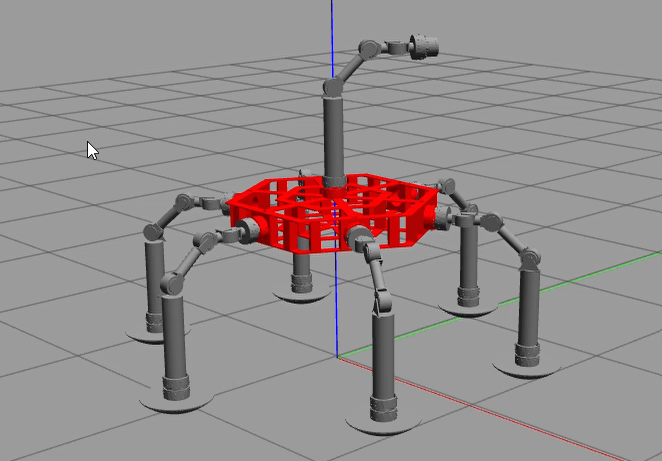
Hexapod Gazebo Simulation
A ROS/Gazebo simulation for a hexapod robot designed for locomotion over lunar terrain.
Developed to verify continually evolving system architecture for submission to NASA BIG Idea Challenge 2022.
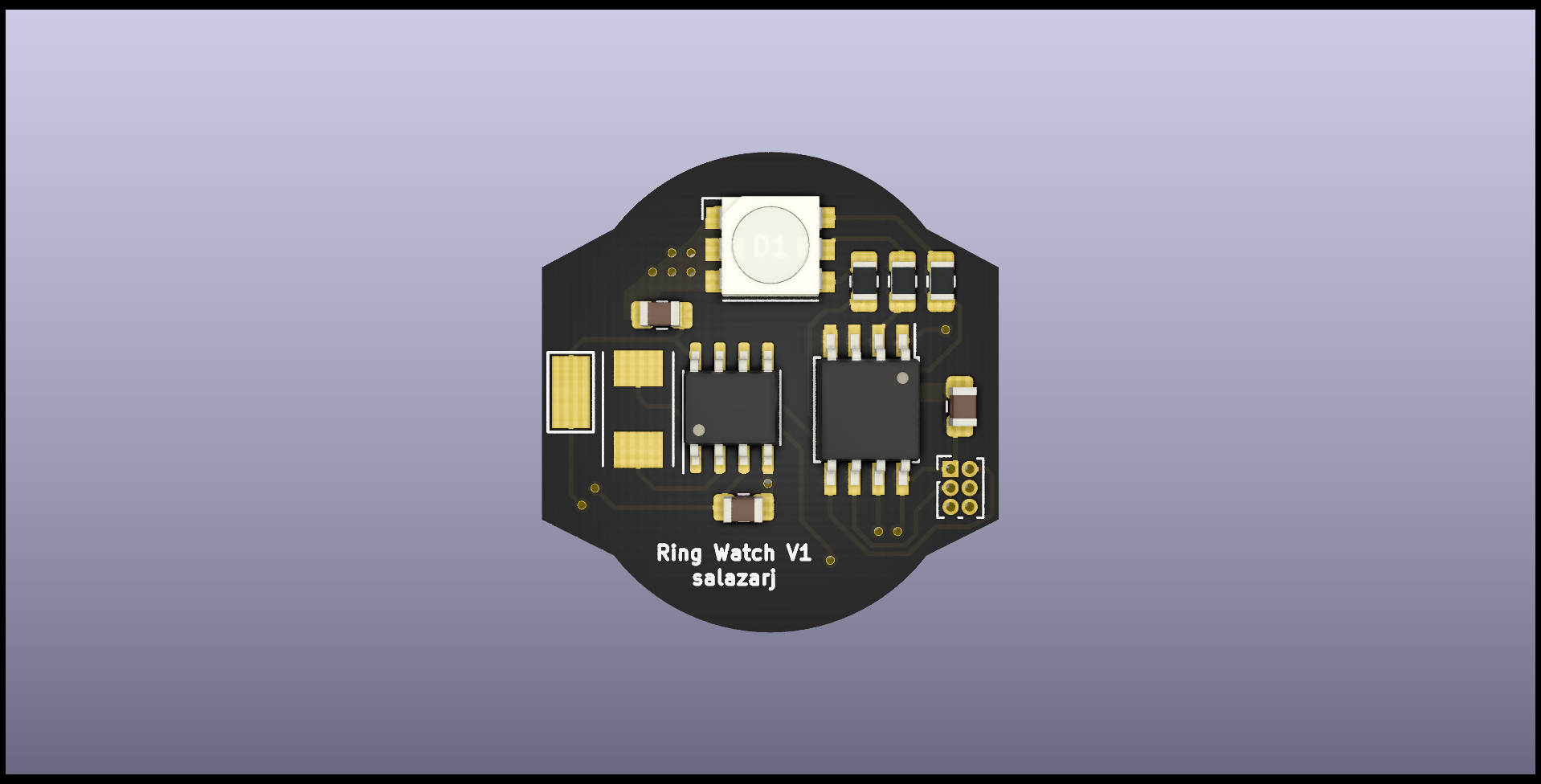
Ring Watch
A silly watch that tells you the time via a single RGB LED... and fits on your ring finger! Based on the ATtiny85 and PCF8523 real time clock.